
地震時のエレベーター自動診断・自動復旧システムの開発 では,エレベーターの自動診断技術を応用し,地震発生時に管制運転にて運転休止したエレベーターを自動的に診断し,異常がなければ自動的に通常運転に復旧するシステムを紹介する。
1. 自動診断システム開発の背景
最近,大規模な地震が連続的に発生し,この地震により広範囲にわたる建物への影響が発生した。地震が発生すると建物ごとに設置されているエレベーターの地震感知器が動作し,走行中のエレベーターは即座に最寄の階に停止して運転を休止する。また,停止中のエレベーターについても運転を休止させる。これはエレベーターの閉じ込め事故や機器の損傷を未然に防止するためである。
しかしながら,昨今のように広範囲な規模で地震が発生すると,多数のエレベーターが同時に運転休止し,運転休止したエレベーターを1台,1台点検して復旧するまでにはかなりの時間を費やすこととなり,ビル・マンションでのエレベーターの利用者に多大な迷惑を掛けることになる。
これらの状況から,エレベーターの自動診断技術を応用し,地震発生時に管制運転にて運転休止したエレベーターを自動的に診断し,異常がなければ自動的に通常運転に復旧するシステムを三菱電機(株)と共同で開発したので紹介する。
2. 最近の地震発生状況
最近の7年間の規模の大きな地震の発生状況を表1に示した。これは三菱電機製のエレベーターの例で比較的大きな地震動により地震感知器が多数動作した地震である。地震の震源がエレベーターの設置台数が比較的多い市街地に近い場合には,地震発生時には一度に多くのエレベーターの地震感知器が動作して運転休止の状態となり,そのエレベーターの復旧に長時間を費やすケースが発生する。
|
表1 地震の発生状況(最近7年間)
|
地震後のエレベーターの復旧に長時間を費やした事例として2005年7月の千葉県北西部地震を説明する。この地震は千葉県北西部の深さ約73kmで発生,マグニチュード6.0で最大震度は東京都足立区で5強,東京都,埼玉県,千葉県,神奈川県で震度5弱であった。エレベーターの運行への影響は非常に大きく,約6万4千台のエレベーターの地震感知器が動作し運転休止となった。運転休止したエレベーターの復旧には専門技術者の点検が必要であり,すべてのエレベーターの運転復旧にかなりの時間を費やした。影響を受けた地域のエレベーターの保守台数は22万7千件あり,その中で地震感知器による地震時管制運転装置が装備されているエレベーターは14万4千台(63%)であった。この地震感知器が装備されたエレベーター中で地震感知器が動作したエレベーターは約半数(44%)の6万4千台であった(日本エレベーター協会データーより*1)。
3. エレベーターの地震時管制運転装置
3.1 地震時管制運転装置
地震時管制運転装置(図1)は,エレベーターに設置されている地震感知器が地震動を感知した場合に早期にエレベーターを運転停止させる装置であり,地震後もそのまま運転することにより起こり得る機器の破損や新たな閉め込め事故の発生を未然に防止する。
 図1 地震時管制運転装置 |
地震感知器は,地震動の加速度に対し「80Gal:特低感知」,「150Gal:低感知」の二段階の感知が可能となっている。地震動が「特低感知」を超えると最寄階に停止し戸開した後,運転休止となるが,「低感知」が動作しなければ通常運転に戻る。地震動が「低感知」を超えると最寄階に停止し戸開した後,運転休止となる。
3.2 地震感知器とP波センサー
地震感知器とP波センサーを図2に示し,P波とS波の関係を図3に示した。
地震動には初期微動(P波:第一波,Primary波)と主要動(S波:第二波,Secondary波)があり,P波は主要動の前に到達するのでエレベーターを早い時点で安全に停止させることが可能となる。走行中のエレベーターが最寄階に停止し,戸開して乗客が降りるまでの時間は一般的に6秒と考えると,初期微動と主要動の速度差から震源からの距離が(深さも含めて)50km程度あれば,主要動が到達する前にエレベーターから降車することが可能となる。
 地震感知器 |
 P波センサー |
|
図2 地震感知器とP波センサー
|
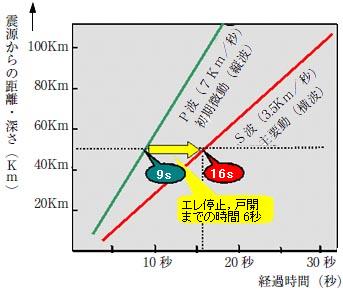 図3 P波とS波の関係 |
4. エレベーターの基本診断技術
4.1 エレベーターのリモート点検システム
地震時の診断技術は,エレベーターの診断技術を応用して開発したので,そのリモート点検・診断運転の技術概要を紹介する。エレベーター診断では保守技術者に代わって診断プログラムがエレベーターの異常,運行状況を常時点検し,異常・変調の兆候があるとその情報を通信回線により保守情報センターに通報することが可能である。リモート点検の点検内容は表2に示す。
|
表2 リモート点検の点検内容
|
||||||||||||||||||||||||||||||||
4.2 エレベーターの遠隔診断運転
利用者の少ない時間帯に診断運転モードに切り替えて高密度,高精度の点検を実施し,軽微な変調も検出する。
夜間などの乗客の乗車していない状態で専用の診断運転モードに移行して診断を行うことにより,機器の変調をより軽微な段階で検出することができ,より高度な予防保全が可能である*2。(表3)
|
表3 遠隔診断の診断内容
|
||||||||||||||||||||||||
5. 地震時自動診断・自動復旧技術の開発
地震発生時の対応上の課題として,大規模な地震が発生し多台数のエレベーターが同時に運転休止となった場合,いかにして異常の有無の確認と復旧を早期に完了できるかにある。エレベーターの異常の確認には,訓練された専門技術者が安全に行うことが必要であり,点検が済むまでエレベーターは運転休止となるため,ビル・マンションの利用者には多大な不便をかける事態が発生する。これらの課題を解決するために地震時自動診断,復旧技術の開発を実施した。
5.1 地震時の物損の状況
地震復旧時の点検で機器の手直し調整や故障修復が必要であったエレベーターのすべてを物的損傷として扱い,過去5年間の物的損傷の状況を部位ごとに分析した(図4)。
 図4 地震時の物的損傷の状況 |
エレベーターでの物的損傷の程度は以下の3点により影響する。
(1)耐震対策の施工の状況
(2)地震時管制運転装置・P波センサーの装備の有無
(3)主要動が到達時のエレベーターの運転状態(走行中か否か)
地震による損傷の多い昇降路の機器を図5に示す。
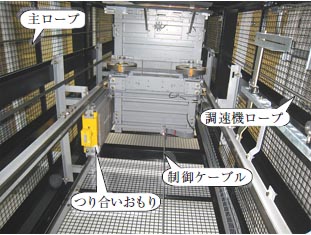 図5 地震時に損傷の多い昇降路機器 |
5.2 自動診断運転の動作について
運転休止したエレベーターは,以下の3点を条件に自動診断運転を開始する。
(1)「高感知:200Gal」の動作なし
(2)かご内に乗客なし
(3)エレベーターの安全装置・安全チェック回路に異常なし
地震時管制運転装置では,最寄の階に停止後,アナウンス装置で降車を促し,照明も消して乗客の居残りや新たな乗り込みも防止している。かご内の無人判定には,以下の3点を用いている。
(1)地震時のエレベーターの運転履歴情報
(2)かご内の重量を検出するはかり装置
(3)かご内防犯カメラによる画像解析情報(人物有無検出)
診断運転の条件を満足した場合には,診断運転に移行する,その場合の診断運転の動作フローを図6に,走行診断モードを図7に示す。微速走行診断から低速走行診断,各階運転と徐々に速度を上げて診断を行う。診断運転によるエレベーター機器の診断個所を図8に示す。診断個所は,安全装置・安全チェック回路診断,主ロープ・調速機ロープ・制御ケーブルの昇降路機器との干渉診断,つり合いおもりのレール外れなどの診断,終点スイッチ・着床装置・ドア開閉装置診断,走行中の異常音診断である。診断には30分程度の時間を要するが,異常が検出されなかった場合は通常の運転に戻して仮復旧させて通常運転に戻し,後に技術者により再確認させて本復旧とする。
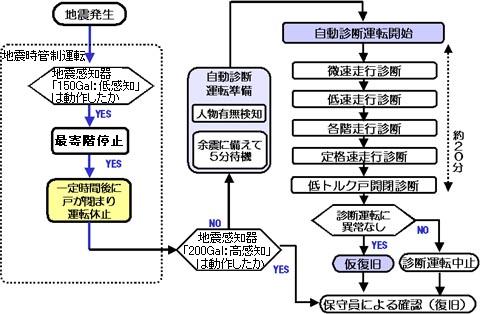 図6 自動診断・自動復旧システムの動作フロー |
 図7 走行診断モード |
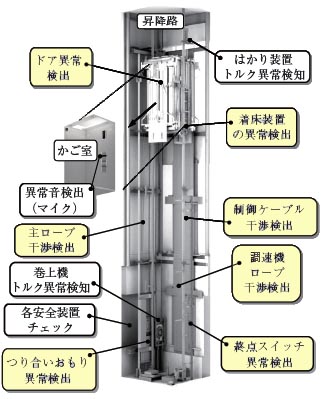 図8 診断運転による診断個所 |
5.3 主ロープなどの昇降路機器との干渉検出
診断運転では診断による機器破損を防止するために,微速による巻上機トルクの出力を平常時と比較し,異常の判定を行う。主ロープ・調速機ロープ・制御ケーブルなどが昇降機と干渉し,走行中に引っかかりなどが発生する過去の事例があり,診断運転により昇降路機器との干渉を確実に検出できることが重要である。エレベーターの巻上機トルクは,(1)昇降路でのカゴの位置(2)低速・微速の走行モード(3)上昇・下降運転(4)レール据付精度(5)周囲温度(6)巻上機温度,により影響を受けるが,診断アルゴリズムにより診断精度の向上と機器破損防止を実現している。(図9)
 図9 干渉試験時のトルク変動 |
6. 地震時自動診断・自動復旧システムの効果
地震時自動診断・自動復旧システムは,地震動の加速度が200Gal以下の場合に運転休止したエレベーターを自動的に仮復旧させることが可能になる。従来のように運転休止したエレベーターを1台1台技術者が巡回して復旧する方法に比べて,異常がなければ約30分で仮復旧できエレベーターの停止時間が飛躍的に短縮される。今後,本技術が普及すると多数のビルで地震後にはエレベーターが仮復旧し運転が再開され,利用者の利便性が格段に向上すると考える。
7. 地震時自動診断・自動復旧システムの展開
2006年10月より,三菱電機製の現行エレベーターの標準低速機種(AXIEZ)を対象に自動復旧システムの運用を開始した。また,2007年10月より既設のエレベーター(1998年以降の標準低速機種)向け,およびリニューアル向け低速機種の自動復旧システムの運用を開始した(本自動診断,自動復旧システムの動作には三菱電機ビルテクノサービス(株)との保守契約の締結が必要)。
最後に
本システムは,国土交通省・社会資本整備審議会 建築分科会,建築物など事故・災害対策部の「エレベーターの地震防災対策の推進について」(案)で報告された「自動診断・復旧システム」の実現を図るものである。対策案では,「エレベーターシャフト内の状況などを自動的にまたは遠隔監視などにより二次災害の危険性がない場合に復旧させるシステムを開発する」と報告されたが,本システムはこの方針に沿ったものである*3。
<参考文献>
*1 碓井安秋:千葉県北西部地震を契機とする昇降機の地震対策強化案検討,建築設備と昇降機(2006)
*2 塩崎秀樹,文屋太陽:昇降機保守“ELE-FIRST”,三菱電機技報Vol.77・No.10・2003
*3 国土交通省 社会資本整備会建築建築分科会 建築物など事故・災害部会(第4回)(2006)